在上篇文章我们讨论了使用 脏矩形渲染,通过重渲染局部的图形来提优化 Canvas 的性能,将 GPU 密集转换为 CPU 密集。
CPU 密集在哪?
在需要遍历 所有的图形,判断它们是否和脏矩形发生相交(碰撞),保存发生碰抓给你的图形,将它们在局部进行重绘。
有没有办法减少需要遍历的图形,不要遍历全部的图形,而是少量的图形呢?有一个办法是使用 四叉树。
四叉树碰撞检测原理
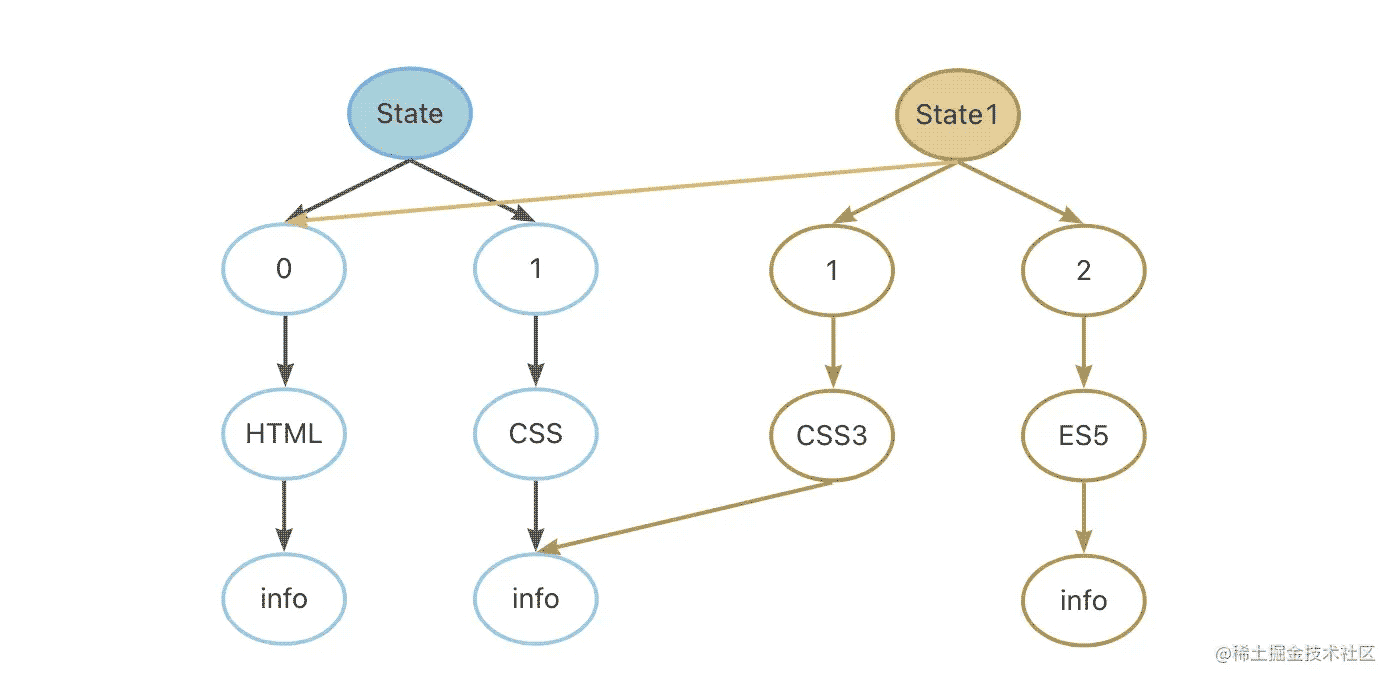
我们将区域的分割表述为 “节点”,因为是四叉树;
将画布上的真实图形就叫做 “图形”。
四叉树本质使用了 空间分割,给图形加 索引,将视口界面分割成多个区域,每个区域记住自己包含了哪些图形。
然后移动目标图形时,判断它落在哪个区域,取出所在区域的图形,这些图形集合就是和目标图形发生碰撞图形的超集。
这些区域外的图形就被我们排除了。
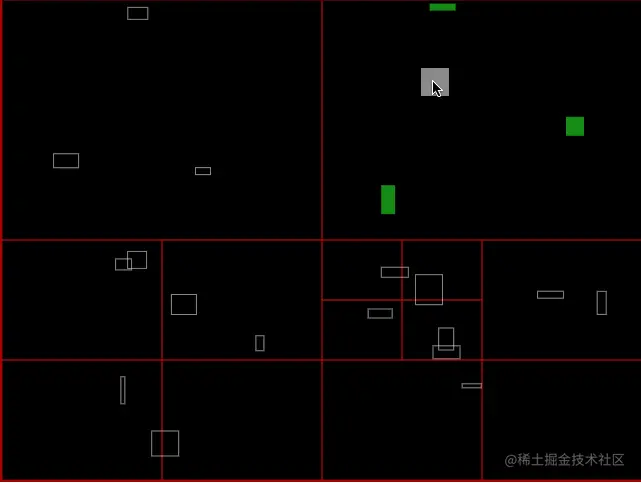
算法实现的要点:
创建根节点,根节点保存区域的信息 x、y、width 和 height。
添加图形时,当一个节点内的节点数量大于阀值,就将整个区域均等切割为 4 等份的子节点,将图形从当前区域取出,重新放入到这些子节点内,从而将节点的归属划分为更小的区域。
(原来的区域转换为索引层,真正保存节点的地方放到了它的子区域上)
当我们提供一个碰撞矩形,我们从四叉树顶节点往下找,看是否有子节点。如果有,使用矩形碰撞算法找出它所在的子节点有哪些(可能有多个)。对这些子节点重复前面的操作,进行递归,找到所有的图形。
这些图形就是碰撞矩形可能相交的矩形,但相对所有图形,又不至于太多。
四叉树碰撞检测算法
先看看经典算法实现。
算法我就不自己实现了,这里展示 quadtree-js 库的代码实现。
github.com/timohausman…
构造函数:
|
1 2 3 4 5 6 7 8 |
function Quadtree(bounds, max_objects, max_levels, level) { this.max_objects = max_objects || 10; // 节点内最大对象数量 this.max_levels = max_levels || 4; // 树的最大深度 this.level = level || 0; this.bounds = bounds; // 区域,结构为 {x, y, width, height} this.objects = []; // 保存图形的地方 this.nodes = []; // 4 个子节点,到达阀值时才创建 } |
这是一个内部私有方法,当节点内图形过多,超过阀值,就将当前节点分 裂成 4 个子节点:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 |
// 切割:生成 4 个子节点 Quadtree.prototype.split = function () { var nextLevel = this.level + 1, subWidth = this.bounds.width / 2, subHeight = this.bounds.height / 2, x = this.bounds.x, y = this.bounds.y; // 右上 this.nodes[0] = new Quadtree( { x: x + subWidth, y: y, width: subWidth, height: subHeight, }, this.max_objects, this.max_levels, nextLevel ); // 左上 this.nodes[1] = new Quadtree( { x: x, y: y, width: subWidth, height: subHeight, }, this.max_objects, this.max_levels, nextLevel ); // 左下 this.nodes[2] = new Quadtree( { x: x, y: y + subHeight, width: subWidth, height: subHeight, }, this.max_objects, this.max_levels, nextLevel ); // 右下 this.nodes[3] = new Quadtree( { x: x + subWidth, y: y + subHeight, width: subWidth, height: subHeight, }, this.max_objects, this.max_levels, nextLevel ); }; |
计算某个图形落在当前节点的哪个子节点,拿到对应节点索引值数组:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
// 找到某个 box 落在在哪个区域 Quadtree.prototype.getIndex = function (pRect) { var indexes = [], verticalMidpoint = this.bounds.x + this.bounds.width / 2, horizontalMidpoint = this.bounds.y + this.bounds.height / 2; var startIsNorth = pRect.y < horizontalMidpoint, startIsWest = pRect.x < verticalMidpoint, endIsEast = pRect.x + pRect.width > verticalMidpoint, endIsSouth = pRect.y + pRect.height > horizontalMidpoint; // top-right quad if (startIsNorth && endIsEast) { indexes.push(0); } // top-left quad if (startIsWest && startIsNorth) { indexes.push(1); } // bottom-left quad if (startIsWest && endIsSouth) { indexes.push(2); } // bottom-right quad if (endIsEast && endIsSouth) { indexes.push(3); } return indexes; }; |
插入一个图形,先看是否存在子节点,有的话说明当前节点变成了索引层,通过矩形碰撞算法找到所在的子节点,对这些子节点做插入操作:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 |
Quadtree.prototype.insert = function (pRect) { var i = 0, indexes; // 存在子节点,则插入到子节点 if (this.nodes.length) { indexes = this.getIndex(pRect); // 找到索引位置 for (i = 0; i < indexes.length; i++) { this.nodes[indexes[i]].insert(pRect); // 递归 insert } return; } // 没有子节点,不是索引层,图形放到前节点下 // (有个小 BUG,就是不在范围内的图形也加上去了) this.objects.push(pRect); // 如果对象太多,构建子节点 if ( this.objects.length > this.max_objects && this.level < this.max_levels ) { if (!this.nodes.length) { this.split(); } // 将 objects 取出,放入这些子节点中 for (i = 0; i < this.objects.length; i++) { indexes = this.getIndex(this.objects[i]); for (var k = 0; k < indexes.length; k++) { this.nodes[indexes[k]].insert(this.objects[i]); } } this.objects = []; } }; |
返回目标图形所在节点下的所有图形:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 |
// 传入一个矩形,取出它所在节点的所有矩形 // 这个方法能返回 Quadtree.prototype.retrieve = function (pRect) { // 提取目标矩形所在区间下的所有矩形 var indexes = this.getIndex(pRect), returnObjects = this.objects; // 可能需要递归。 //if we have subnodes, retrieve their objects if (this.nodes.length) { for (var i = 0; i < indexes.length; i++) { returnObjects = returnObjects.concat( this.nodes[indexes[i]].retrieve(pRect) ); } } // 移除重复的节点 returnObjects = returnObjects.filter(function (item, index) { return returnObjects.indexOf(item) >= index; }); return returnObjects; }; |
非常简单,一些可以改善的能力。
- 没有添加映射功能,最后返回的图形都是 box 对象信息,我们可以考虑改造为 insert(rect, data),保存额外的信息,比如实际形状对象或 id。
- 动态收缩:移除某个图形后更新树结构,并在发现图形数量低于阀值时,取出图形放到父节点上,销毁子节点;
- 修改根节点范围 后,需要重置整棵树,如何高效重置等;
- 四叉树的图形类型,常见的是矩形,但还可以是点、直线、曲线等,如果需要可以考虑支持。
请根据实际需要进行扩展。
一些权衡
处于节点内分割线上的图形,它是归属于多个子节点的,所以最终会同时放到它的多个子节点下,会花费内存。
极端情况下,一个非常大的图形,会保存在所有的节点下。
如果想节省内存,可以直接保存到当前节点上,不放到子节点上,可以减少内存使用,只是最后返回的被碰撞图形会多一点。因为图形可能只压在了两个子节点的交界线上,比如 A、 B ,但目标矩形是在其他的子节点 C 上,但因为它们来自同一个父节点,所以拿到了这个不可能在 C 的图形。
后者会更好一些,但如果一个图形刚好在画布中心,那每次取出的碰撞图形都会有它(这点可以通过松散四叉树解决)。
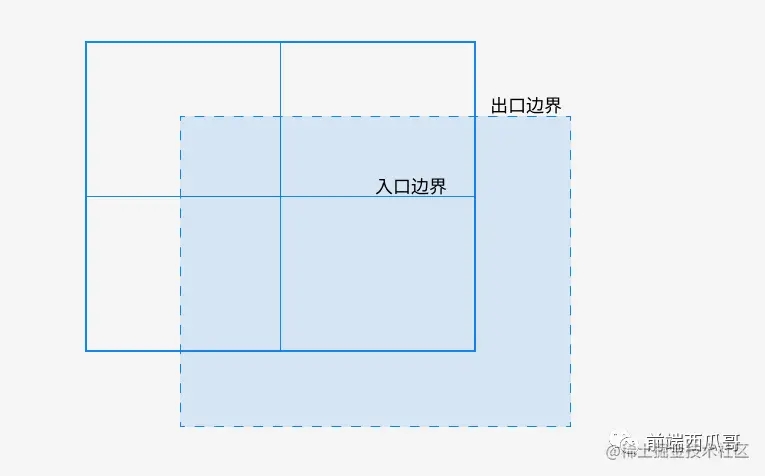
松散四叉树
经典四叉树有个问题,就是如果图形的物理信息是比较动态的,当总是在边界附近时,就会发生频繁地将图形从一个节点取出并放到另个节点下。
对此我们可以额外设置一个出口边界。这个出口边界要比入口边界要大,只有当图形离开这个出口边界,才会更新提取图形到新的节点。
这样,当图形划分到另一个节点上时,就 需要移动较长的距离才能回到原来节点下,轻微地移动不会导致剧烈的更新。
通常出口边界边长为入口边界的两倍最佳,为什么不知道,经验之谈。
其他空间分割思想的算法
简单介绍一些也使用了 空间分割 思想的算法。
- 跳表:一种有序链表,通过叠加大量的索引层,可以进行链表形式的 “二分查找”,达到高效的 O(logn) 时间复杂度,但也带来了内存的消耗。Redis 中的有序集合(Sorted Set)底层使用了跳表,一个原因是可以高效地获取区间内的数据集;
- B+ 树:一种平衡二叉树,有点像跳表,但树的层数最多为三层,MySQL 的索引实现使用了 B+ 树,因为层数较少,可以减少 IO 操作;
- R 树:R 表示矩形的意思。相比前面两种单维的范围查找,R 树能做高效的高维查找。比如地图中,我们可以通过 R 树将 距离 相近的高维图形合并为一个大节点,当搜索 “2km 内的药店” 时,如果你落到某个大节点上,我们只要遍历一个大节点下的所有节点,而不是遍历整个市,或整个国家。
R 树的思路是最接近四叉树的,它其实是另一种 减少图形遍历的方案,可以适用于高效剔除视口范围之外的图形。
R 树有个 star 数很多的库,叫做 RBush,感兴趣可以看看。
github.com/mourner/rbu…