嵌入式数据库SQLite 3配置使用

0、惨痛教训 随着管理开发的项目体积越来越庞大,产品系统涉及的数据量也越来越多,并且伴随着项目不久就要交付给甲方了。如果项目的数据信息没有被妥善管理,后期设备的运行状态、操
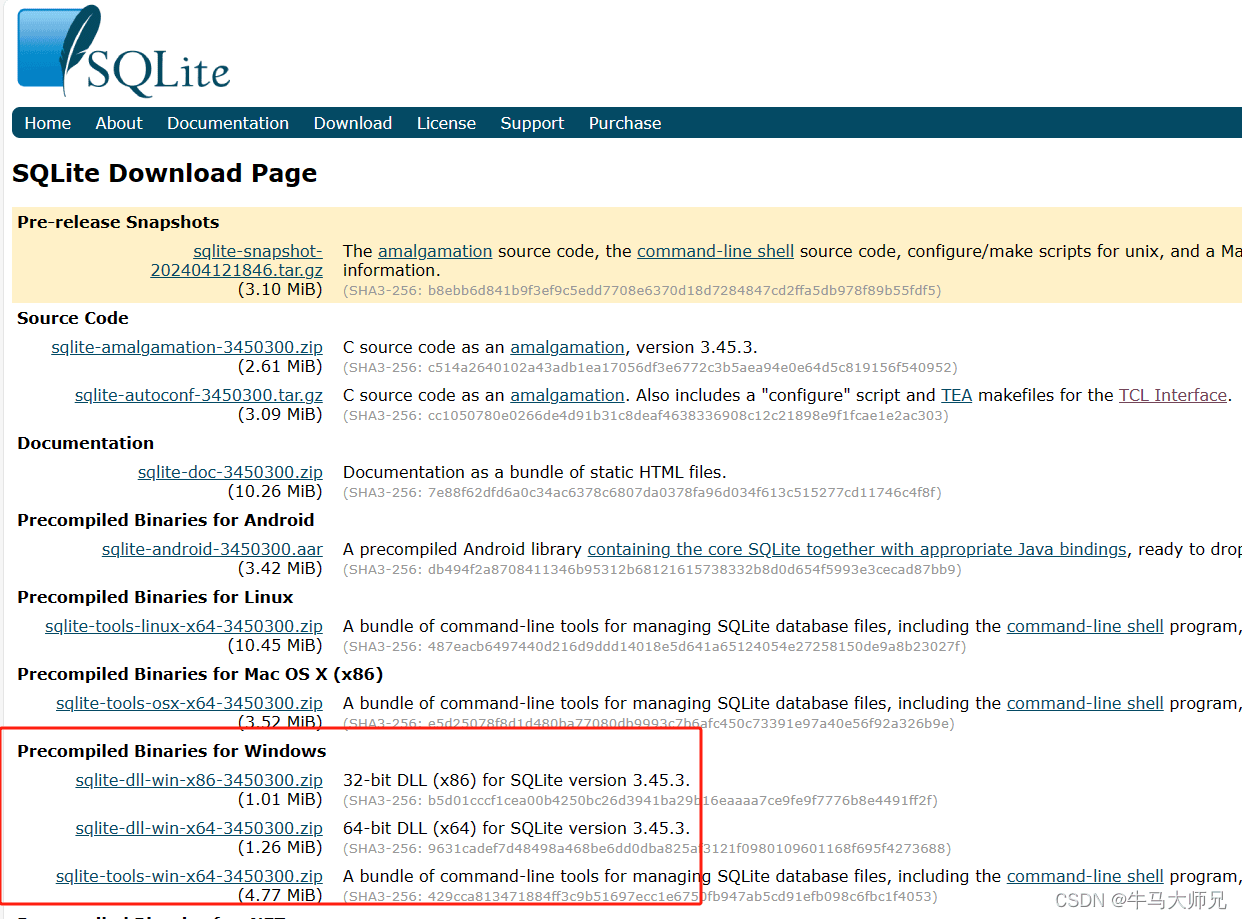
0、惨痛教训随着管理开发的项目体积越来越庞大,产品系统涉及的数据量也越来越多,并且伴随着项目不久就要交付给甲方了。如果项目的数据信息没有被妥善管理,后期设备的运行状态、操作状况等数据流信息不能被溯源,当出现了一些特殊意外时,就会导致对于故障信息不能迅速准确的追踪,甚至会被甩锅、推卸责任,白白当了冤大头。因此对于嵌入式项目中,其产品运行时的数据库建立非常有必要,且是迫在眉睫!!! 目前常用的数据库系统有:MySQL、PostgreSQL、Oracle Database、Microsoft SQL Server、SQLite等。在嵌入式项目中,前面几个数据库显然是不合适的,而SQLite是一个轻量级的数据库管理系统,它包含在一个C库中,提供了零配置、无服务器、事务性的SQL数据库引擎。所以SQLite的特点使其非常适合嵌入式系统、移动设备、小型项目或者作为应用程序的本地数据库使用。本文选用了嵌入式数据库SQLite3进行配置和讲解。 1、Sqlite3环境配置(1)、下载安装SQLite库根据目标系统平台,下载sqlite源码,或下载官方提供的已经编译好的库。本文目标平台是Windows11 64位平台,进入SQLite Download Page的主页,选择需要的库版本(Windows)。
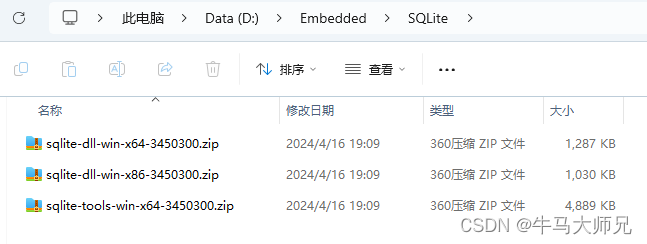
下载的压缩包一共有如下所示的三个: sqlite-dll-win-x64-3450300.zip sqlite-dll-win-x86-3450300.zip sqlite-tools-win-x64-3450300.zip
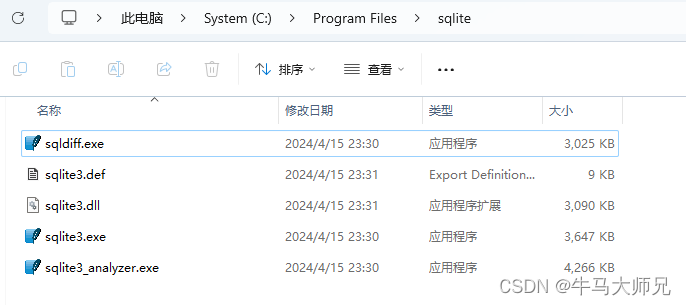
(2)、解压下载的文件本文中将对应的Sqlite库文件解压到了,C:\Program Files\sqlite路径下。
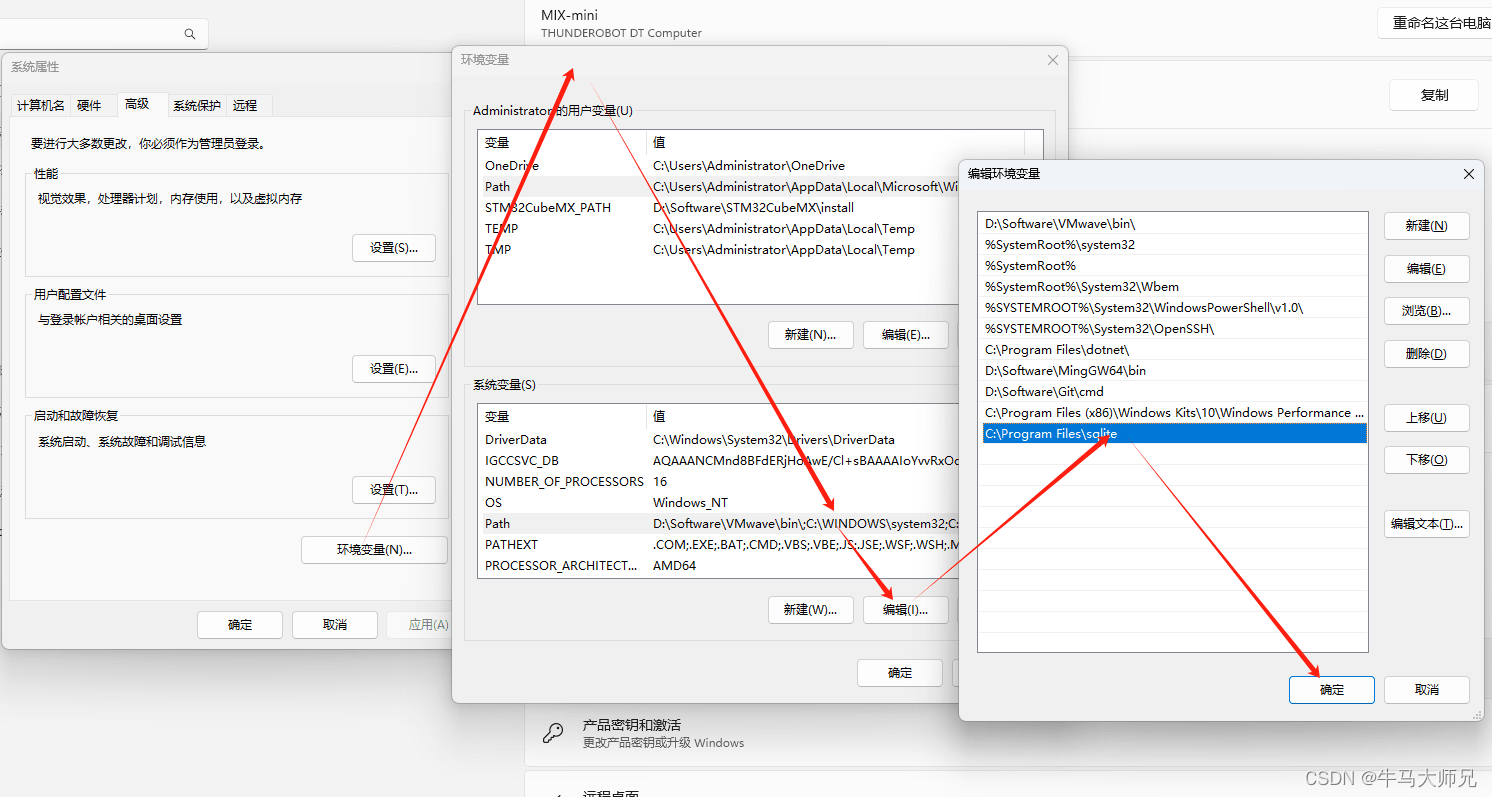
(3)、添加库路径到环境变量根据下图所示的步骤,进入系统属性-->环境变量-->系统变量-->编辑环境变量,将路径加入到环境变量中。
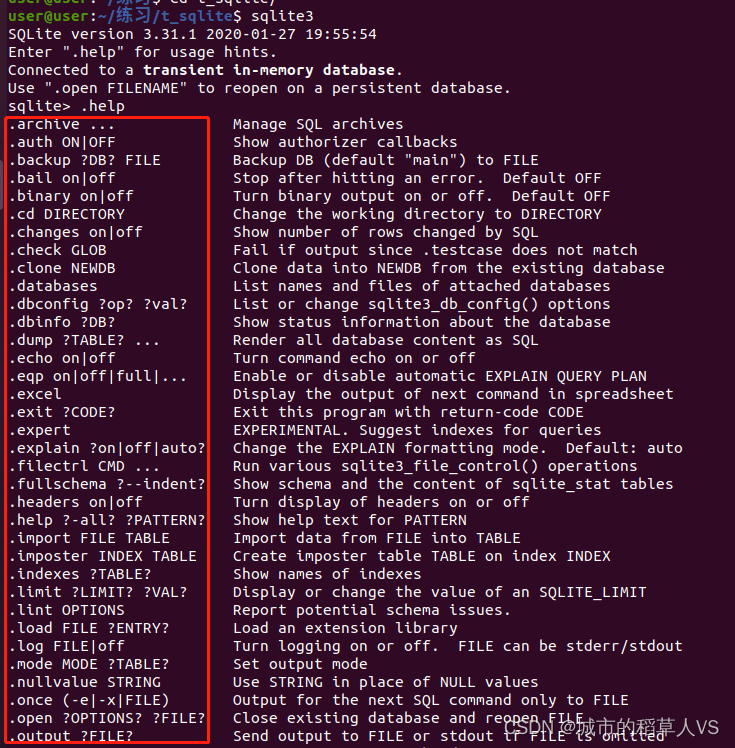
(4)、检查数据库安装状态打开Windows的命令行,输入sqlite3,有类似如下的数据信息说明库安装成功,后续只需在程序代码中,将库加入到工程代码中即可。
(5)、SQLiteStudio工具如果有可视化分析数据需求、推荐使用下载:SQLiteStudio https://sqlitestudio.pl/
2、SQLite3基础SQL(Structured Query Language)是一种结构化查询语言,SQL 是一种专门用来与数据库通信的语言。 不同的数据库管理系统在其实践过程中都对 SOL 规范作了某些改编和扩充。故不同数据库管理系统之间的 SOL语言不能完全相互通用。 以下是SQLite的一些关键特点:
有个重要的点值得注意,SQLite 是不区分大小写的,但也有一些命令是大小写敏感的,比如 GLOB 和 glob 在 SQLite 的语句中有不同的含义。一般数据采用固定的静态数据类型,而 SOLite 采用的是动态数据类型,会根据存入值自动判断。 SQLite 存储类:SOLite 具有以下五种基本数据类型 (1)integer:带符号的整型(最多64位)。 (2)real:8字节表示的浮点类型。 (3)text:字符类型,支持多种编码(如 UTF-8、UTF-16),大小无限制。 (4)blob:任意类型的数据,大小无限制。 BLOB(binary large obiect)二进制大对象,使用二进制保存数据。 (5)null:表示空值 SQLite 亲和类型(Affinity)及类型名称 下表列出了当创建 SQLite3 表时可使用的各种数据类型名称,同时也显示了相应的亲和类型:
SQLite 语句:所有的 SQLite 语句可以以任何关键字开始,如 SELECT、INSERT、UPDATE、DELETE、ALTER、DROP 等,所有的语句以分号 ; 结束。 3、SQLite3基本语法(1)、创建数据库
(2)、创建表
(3)、删除表
(4)、插入数据
(5)、查询数据
(6)、删除数据
(7)、修改数据
4、SQLite3代码
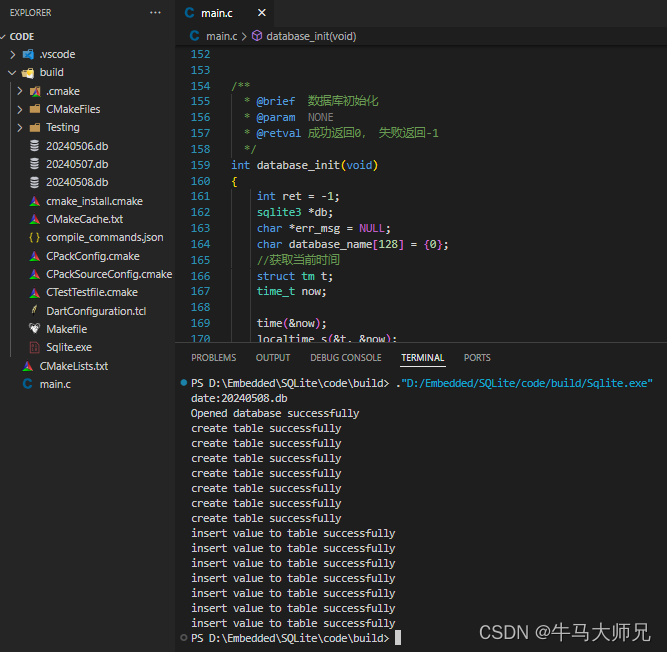
参考代码运行结果
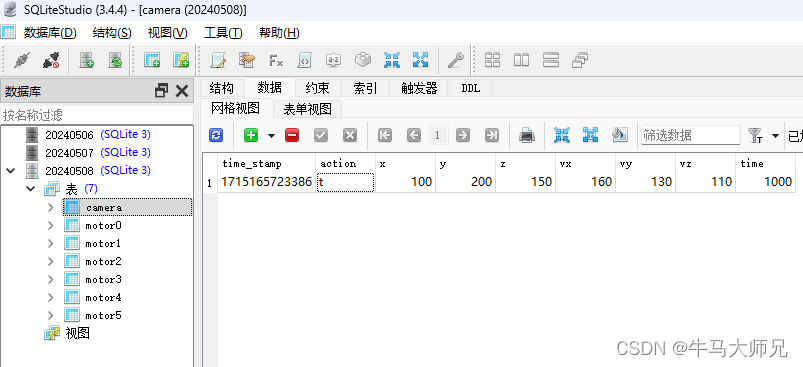
使用可视化工具SQLiteStudio,对SQLite3数据库进行查看。
|
您可能感兴趣的文章 :

-
Sqlite3基本语句及安装过程
SQLite3简介 SQLite3是一款轻量级的、基于文件的开源关系型数据库引擎,由 D. Richard Hipp 于 2000 年首次发布。它遵循 SQL 标准,但与传统的数据 -
在SQLite中进行批量操作的有效实现方法
SQLite 是一个轻量级的关系型数据库管理系统,因其高效性和易用性而广受欢迎。在许多应用场景中,批量操作的需求是不可避免的,例如在 -
sqlite3自动插入创建时间和更新时间的功能实现
最近在记录一些简单的结构化日志信息时,用到了sqlite3数据库(保存的信息比较简单,用Mysql,SQL Server,Postgres这些数据库有点小题大做) -
SQLite转换字符串为日期的代码
在SQLite中,日期可以用字符串、整数或实数表示。常用的日期格式包括YYYY-MM-DD和YYYY-MM-DD HH:MM:SS。当我们将日期存储为字符串时,可以使用日 -
sQlite常用语句以及sQlite developer的使用与注册
sQlite是开发中比较常用的轻量级数据库。通常只占据几百k的内存空间,所以在ios开发中,苹果将sQlite作为数据库应用在苹果开发中,当然, -
SQLite实现if not exist 类似功能的操作
需要实现: 1 2 3 4 5 if not exists(select * from ErrorConfig where Type=RetryWaitSeconds) begin insert into ErrorConfig(Type,Value1) values(RetryWaitSeconds,3) end 只能用: -
CentOS下更新SQLite版本的方法教程
查看系统的sqlte3的版本 1 2 3 [root@djangoServer work]# sqlite3 --version 3.7.17 2013-05-20 00:56:22 118a3b35693b134d56ebd780123b7fd6f1497668 [root@djangoServer work]# 果然 -

一篇文章带你掌握SQLite3基本用法
一、基本语法 1.常用指令 1 2 3 4 5 6 7 8 .open filename --打开文件 -- 注解 .show --显示SQLite 命令提示符的默认设置 .q --退出 .databases --显示数据


-
一篇文章带你掌握SQLite3基本用法
2022-08-26
-
sQlite常用语句以及sQlite developer的使用
2022-08-26
-
Sqlite3基本语句及安装过程
2025-12-17
-
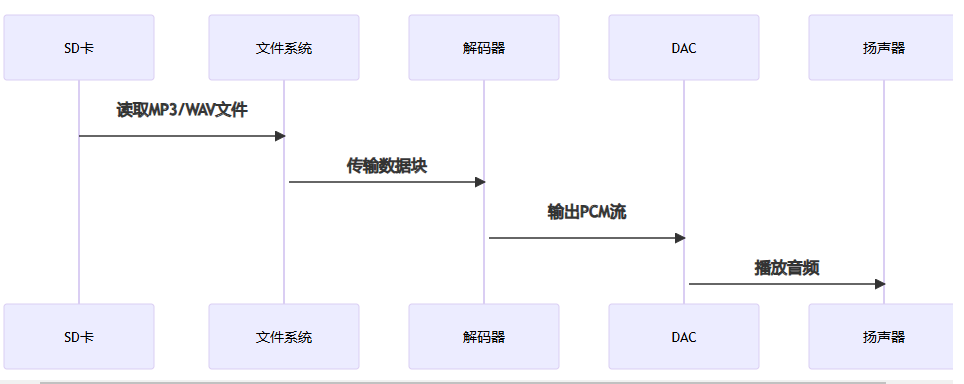
SQLite3在嵌入式C环境中存储音频/视频
2026-01-02
-
嵌入式数据库SQLite 3配置使用
2026-01-02